
Archbot
I have been developing an algorithm with the main goal of generating a variety of floor plan options. The design and space planning processes work from the inside->out and the outside->in through an iterative process. An algorithm that simulates this must work in the same way, but using computing power to reach further. Research into tiling, bin packing, genetic algorithms, coordinate geometry, and combinatorial structures have been essential in the development of Archbot. Much work is still needed, but my time spent has given me a good vector for R&D.
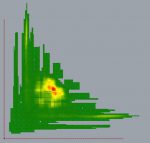
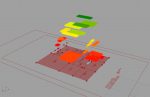
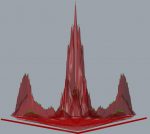


I have begun to generate floor plans for single-family ranch homes with 15 rooms. Ideally, the algorithm will explore combinatorial variety, and could be altered for use in modular designs. Although architecture is not about fitting rectangles within larger rectangles, this is a reductive approach that helps in tackling basic organizational structures and will eventually graduate to higher complexity. This is also how I design, often starting with simple concepts, and through design and documentation the finer details emerge, tying everything together.
Please read more detailed explanations of Archbot in my blog posts:
Archbot: Dynamic Potential